EASY-ROB™ AutoPath™
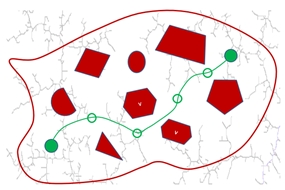
Collision-free path planning
EASY-ROB™ AutoPath creates collision-free paths. The automatic calculation greatly simplifies the work of the operator –
And also brings to your software
Industry 4.0!
Download Flyer
After geometric conditions are met, the collision check is performed.
Further information on EASY-ROB™ Collision can be found in the corresponding flyer
Application Possibilities
- Industrial robots
- Service robots
- Animation and simulation
- Motion planning
- Assembly tests
- Offline programming
- Measurement protocols
- Autonomous driving
- Industry-independent
Advantages
- Automatic calculation of WayPoints and axis configurations
- Callback functions
- Easy integration into technology driven software solutions
- API available
Automatic calculation of WayPoints
- Due to the automatic calculation of WayPoints obstacles are going to be avoided
- with a sophisticated RRT search algorithm
Callback functions
- Cartesian Space
- Collision
- Tube Constraints
- Travel Ranges
- Let your individual constraints be taken into account
Calculation of axis configurations
also supplies the axis configuration for each WayPoint
API
C/C++ and C# Method class ERAuto_CAPI
Specification of travel ranges
Axis constraints for the travel ranges can be defined via API
Integration
- Detailed doxygen documentation
- Programming examples for MS Visual Studio® C/C++ und C#
Support
Support for individual integration
System requirements
Windows® 10 64-Bit