EASY-ROB™ Kernel
Software module for
robot simulation
You need Robotics functionality for your software?
Then the EASY-ROB™ Kernel is exactly the right solution.
Download Flyer
Demoversion
The Robotics booster for your application!
With the Kernel, you now have instandly more than 1000 robots for kinematic calculations, and a trajectory planner (motion interpolation) for PTP, SLEW, LIN, and CIRC motions. A powerful collision detection and numerous mathematical functions are also available.
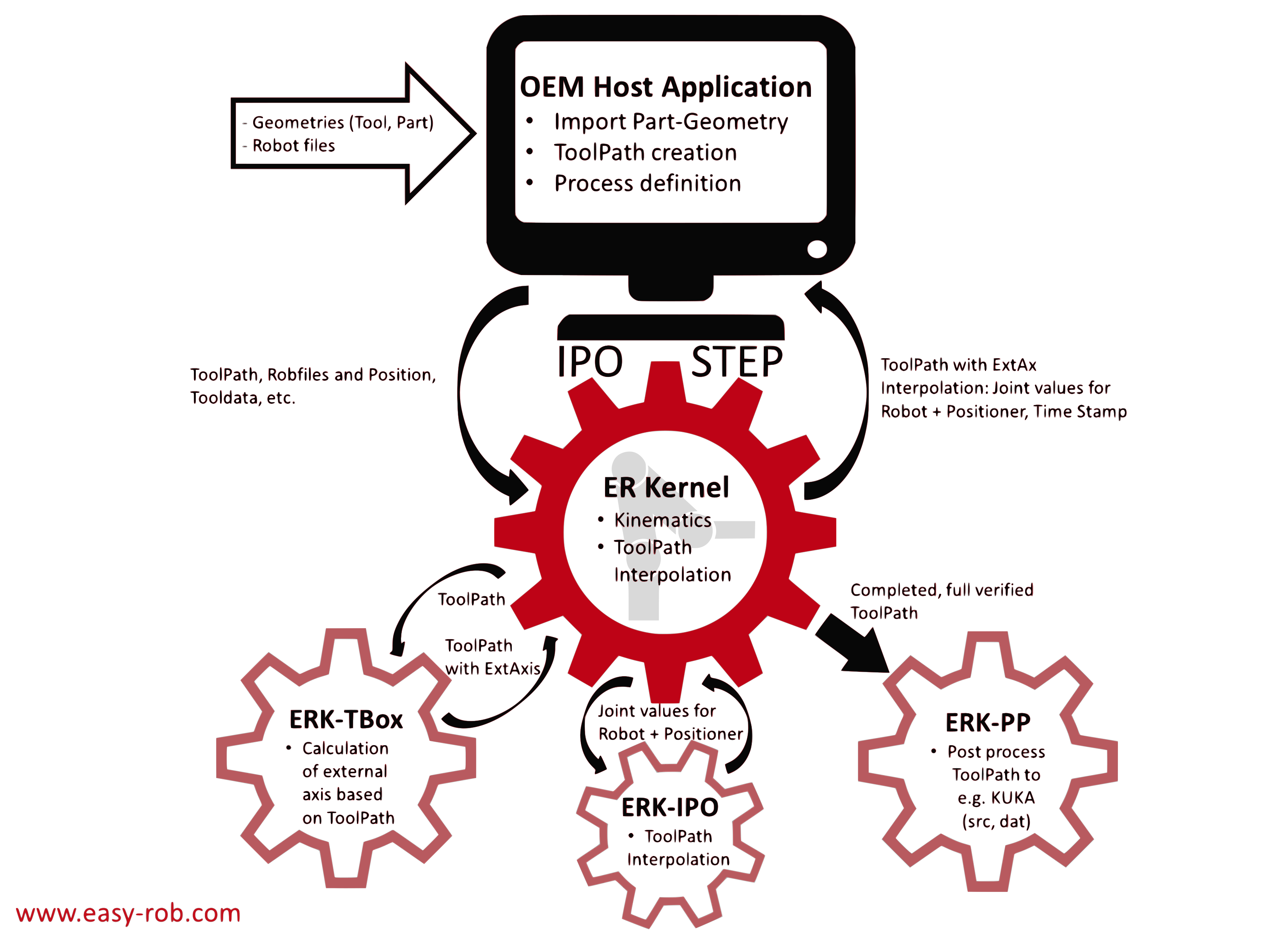
The EASY-ROB™ Kernel is designed as a plug in for integration in technology-based software applications (host application) from OEM partners. Only API functions and services for the robot functionality are provided.
The host application handles 3D visualization as well as the administration of all geometries and handles of all kinematics.
Our OEM Partners have successfully integrated the kernel into their software for years.
Advantages
- Integration in technology-based software solutions
- Bidirectional control
- 100% Robotics know-how
- Robot Libraries
- Motion planning and execution
- ToolBox for special calculations (option)
- Collision detection with clearance (option)
- AutoPath ™ collision-free path planning (option)
- 3D visualization by your host application
- Available for Windows® (x64)
Robot Libraries
The Robotics Simulation Kernel accesses the EASY-ROB™ robot libraries.
With currently more than 1000 models you are always on the safe side, no matter which robot you want to simulate in the future.
Additional advantages
- More than 1000 modells
- Modeling of own robots, positioners, grippers, turntables and
special special kinematics - Attributes e.g. travel ranges, max. speeds and accelerations
- Formula parser with mathematical functions
- Numerical solution method



Basic functionality
Trajectory planning and -execution
- Motion types: PTP, LIN, CIRC, SLEW
- Jerk free and phase synchronous velocity profile
- Tool- and work piece guided movement (external TCP)
- Synchronization with external axes
- Track motion (LVA), conveyor tracking
- Paint shops, tracking windows
- ToolPath (trajectory) definition
- Automatic reduction of speed, due to singularity
- Cycle time estimation
Integration
- Detailed Doxygen documentation
- Method class ERK_CAPI
- Programming examples: Kinematics, Interpolation, ToolPath, Post Processor, AutoPath™ and Collision
- Microsoft® Visual Studio C++ development environment
ERK Interpolation/Trajectory Planner
The ERK Trajectory Planner allows to set a target position with SET_NEXT_TARGET for each loaded kinematic, which is then accessed by cyclically calling GET_NEXT_STEP.
Furthermore, any ToolPathes that contain any targets with motion attributes such as motion type, speed, acceleration, job data, external axis values, etc. can be generated.
Finally the Post-Processor creates a program for the robot
Supplementary modules for the Kernel
Extend the functionality of your Kernel thanks to the modular design of our software.
AutoPath™
Collision-free path planning
Collision
Collision detection of 3D objects
API-Post-Process
Create individual post processors
3D-PDF Export SDK
The entire 3D simulation with animation in just one PDF document
ERK ToolBox
Calculation of the external axis values of ToolPath targets for 1 or 2-axis positioners or for tracking axis depending on defined constraints, e.g. regarding the tool orientation.
Individual adjustments and extensions of the ToolBox functionality after agreement and clarification of the technical requirements possible.
ERK Post-Process
Application Program Interface (API) for creating individual post-processors that generate a program for the robot/controller from the simulated and verified ToolPath.
ERK Multi-KIN
The number of robots and / or kinematics is not limited.
ERK Positioner
Synchronized movements with external positioner
ERK Trackmotion
Synchronized movements with external tracking axis
ERK Conveyor
Synchronized movement with a conveyor
ERK External TCP
Workpiece-guiding movements with an external TCP
ERK Tracking Window
Part Detect, Boundary UP / Down for painting applications