EASY-ROB™ App
Ihr Einstieg in die Welt der Robotersimulation
Software für Anwender.
Profitieren Sie von 20 Jahren Benutzererfahrung und
weit mehr als 1000 Robotermodellen!


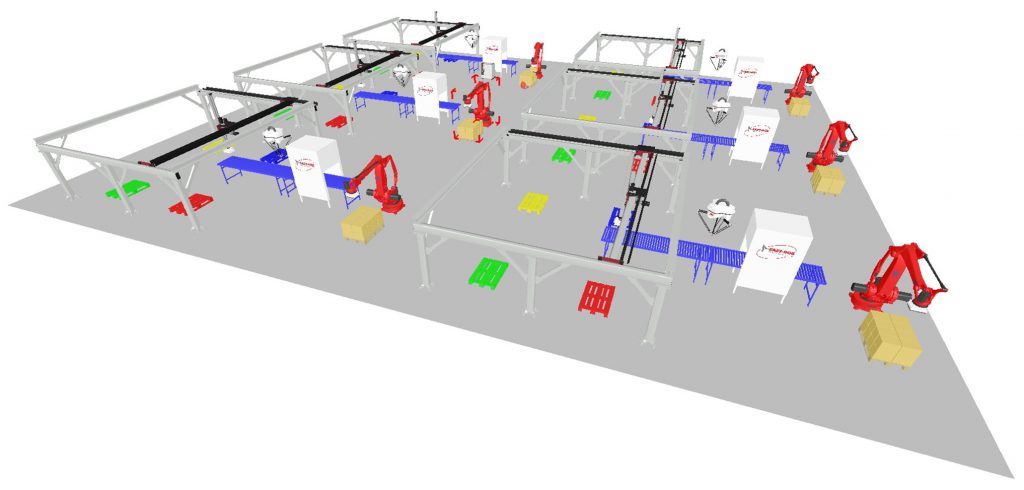


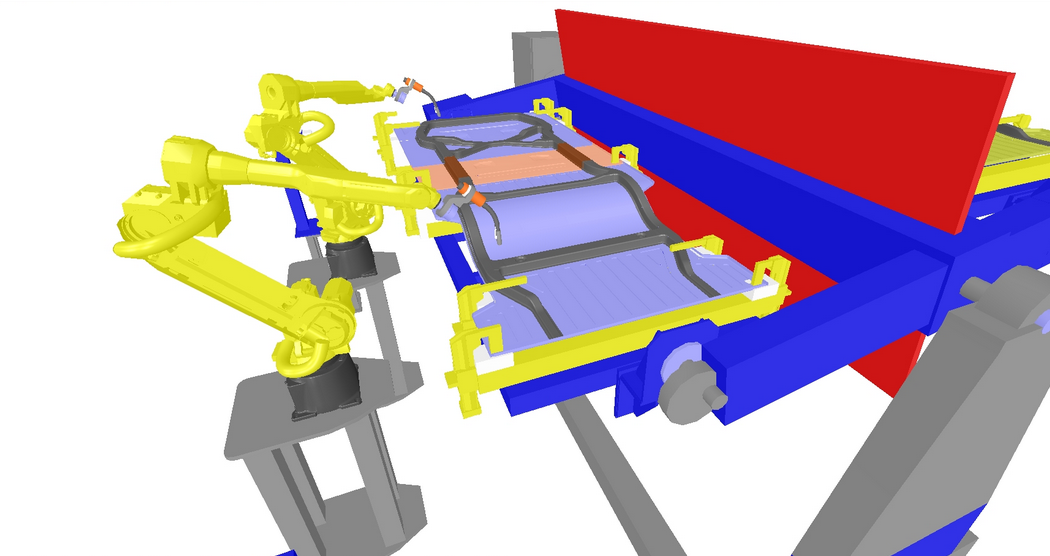
Die EASY-ROB™ App bedient alle Ihre virtuellen Prozessschritte und ist für Endanwender gedacht mit einer durchgehenden Unterstützung bei der Simulationserstellung.
Von der Planung der Roboterarbeitszelle, über das Prüfen von Zugänglichkeiten, Kollisionen und Verfahrbereichen, bis zur Taktzeituntersuchung und Programmerzeugung.
Die EASY-ROB™ App ist in zwei Versionen erhältlich: Simulate & Professional
Download Flyer
Demoversion
Simulate
3 Roboter inklusive
- Visualisierung
- Collisionserkennung
- Import 3D-Daten
- Multi-Robot
- kostenloses Online-Training
- WibuKey: flexible Lizenzierung
- Präsentation via 3D-PDF mit Animation
Professional
Ganze Roboterbibliotheken erhältlich
- über 1000 verschiedene Roboter
- Individuelle Produktanpassung
- Skalierbar über eine Vielzahl an Optionen z.B. AutoPath™
- Visualisierung
- Collisionserkennung
- Import 3D-Daten
- Single oder Multi-Robot
- Individuelles Training
- Viele Lizenzierungsverfahren z.B. Netzwerklizenz
Features & Funktionen
Roboterbibliotheken
Hersteller
ABB, b+m, Comau, Denso, Dürr, Eisenmann, FANUC, Guedel, igm, Kawasaki, KUKA, Mecademic, Mitsubishi, Omron/Techman, OTC-Daihen, PKM Delta, Reis, STÄUBLI, Tricept®, Unimation, Universal Robots, YASKAWA.
Weitere Vorteile
- Modellierung von eigenen Robotern, Positionierern, Greifern, Drehtischen sowie spezieller Kinematiken.
- Attribute z.B. Verfahrbereiche, max. Geschwindigkeiten und Beschleunigungen.
- Formel Parser mit mathematischen Funktionen.
- Numerisches Lösungsverfahren für inverse Kinematik bei Sonderkinematiken.



Multi-Robot
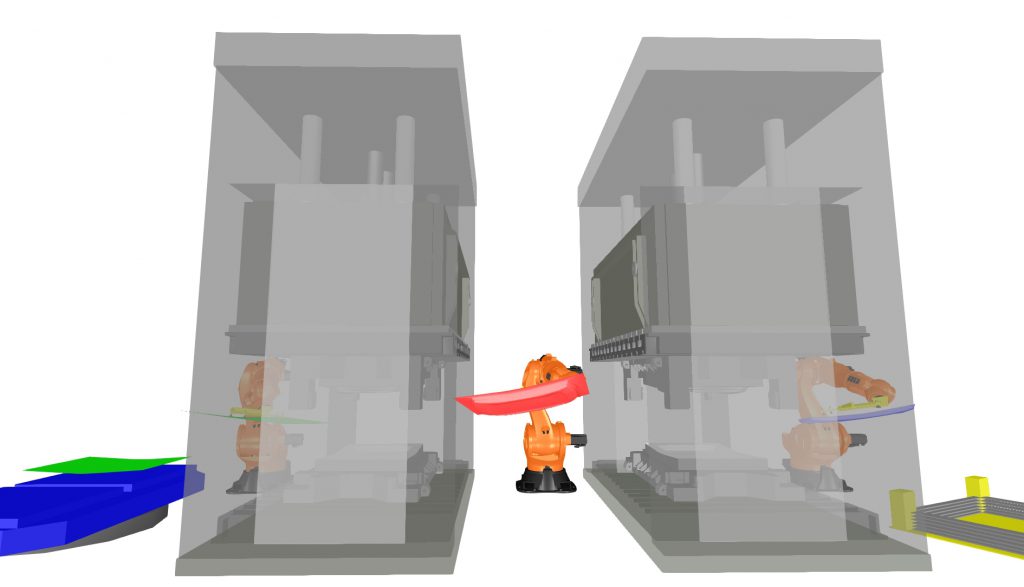
Die Anzahl der Roboter und Programme pro Arbeitszelle ist nicht limitiert. EASY-ROB™ Multi-Robot Version bietet den vollen Funktionalitätsumfang.
- Roboter lassen sich synchronisiert und gleichzeitig bewegen, wobei die Programme über I/O- Signale kommunizieren.
- Die Anzahl der Roboter pro Arbeitszelle ist nicht limitiert. Kinematiken wie Greifer, Positionierer und/oder Zuführeinheiten können beliebig oft geladen, verkettet und simuliert werden.
- Mit Multi-Robot lassen sich mehrere Roboter und Kinematiken synchronisiert und gleichzeitig bewegen, wobei die Programme über I/O-Signale kommunizieren.
Simulation – Programmierung der Arbeitszelle
- ERPL EASY-ROB™ Program Language
Sprache mit Roboterbefehlen zur Erzeugung der Ablaufprogramme. Digitale Signale und Variablen zur Programmsynchronisation. Formel Parser mit mathematischen Funktionen - ERCL EASY-ROB™ Command Language
Sprache mit Simulationsbefehlen wie das Einschalten der Kollision, der Tcp-Spur etc. - History Diagramm
detaillierte Protokollierung mit graphischer Anzeige zur Auswertung und Dokumentation der Simulationsergebnisse. Export als jpg oder bmp – Datei - Kamera-Funktion
Beliebige Positionierung einer Kamera in der Arbeitszelle zur individuellen Betrachtung aus anderen Perspektiven

Projektverwaltung
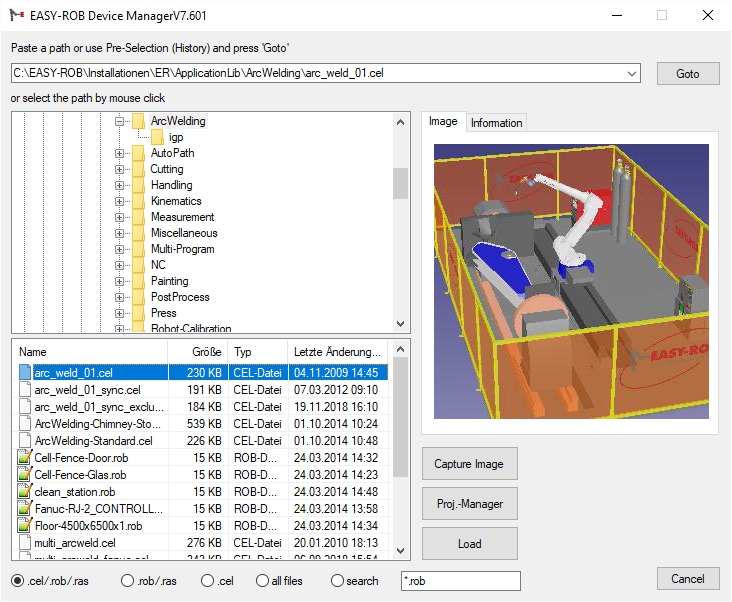
- Device Manager
Verwaltung von Kinematiken, Bauteilen, Vorrichtungen und Werkzeugen, die als Bild mit textueller Kurzbeschreibung hinterlegt sind. - Projekt Manager
Datenbank mit Visualisierung zur kunden- bzw. projektbezogenen Archivierung der Arbeitszellen.
Layoutplanung
- Erzeugen von Pfaden, die eine unbegrenzte Anzahl von Zielpunkten (TAG-Points) beinhalten. Pfade können mit Geometrien und/oder Kinematiken verknüpft werden. Somit wird der Prozess definiert. Die Kinematiken und Geräte werden anschließend optimal positioniert.
- Schneller Austausch von Robotern und Kinematiken
- Überwachung von Zugänglichkeiten, Verfahrbereichen, Geschwindigkeiten- und Beschleunigungen
- Hierarchische Kollisionserkennung mit Toleranzbetrachtung
- Individuelle Messfunktionen – Abstands- und Kreisvermessung

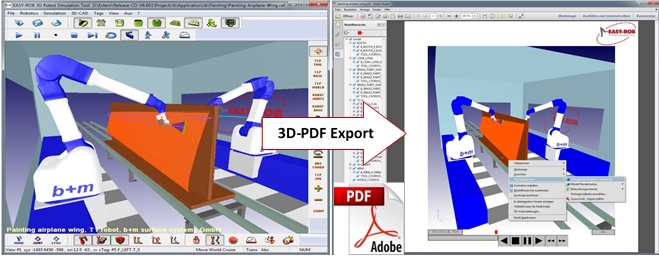
3D-PDF Export
Die gesamte 3D-Simulation mit Animation in nur einem PDF-Dokument
Nutzen Sie das neue EASY-ROB™ 3D-PDF Export und erstellen Sie in nur wenigen Schritten ein animiertes PDF-Dokument von Ihrem Simulationsablauf.
Auch als SDK erhältlich:
Integrieren Sie in Ihre technologiebasierte Software benötigte Funktionen per C/C++ und C# Methodenklasse.
Präsentation
Erzeugen von Video-Dateien (AVI) und animierten VRML-Sequenzen
Optional verfügbar: RunTime
Zur Erzeugung geschützter Arbeitszellen. Damit wird das Laden und Absimulieren vorhandener Arbeitszellen mit dem kostenfreien EASY-ROB™ – Viewer Version z. B. zu Präsentationszwecken ermöglicht.
CAD Daten-Import und -Export
- Modellieren einfacher parametrisierbarer 3D Geometrien, z. B. Würfel, Kugel; Kegel , Zylinder
- Standard-CAD-Daten-Import
IGP / STL ascii und binär / 3DS / VRML I + II,97 - CAD-Daten Standard-Export
STL binary, VRML II,97 und IGP Part file - Optionaler CAD-Daten-Import *)
Neutrale Schnittstellen: STEP
Bedienung und Lizenzierung
- Intuitive Bedienoberfläche
- ERC Searcher
- Einfache Suchfunktion von EASY-ROB™ – Programm – Befehlen in bereits erstellten Projekten
- EASY-ROB™ kann an einem PC beliebig oft gestartet werden
- Hardwarebezogenes Lizenzierungsverfahren (PC-gebunden)
Optional: WIBU-KEY USB-Dongle *) - PC-unabhängiges Lizenzierungsverfahren
Optional verfügbar: Lizenz Manager *)
zur Verwaltung und Freigabe der vorhandenen Lizenzen
Systemanforderungen
EASY-ROB™ läuft auf handelsüblichen Laptops und PCs unter Windows® 7 und 10. Wir empfehlen Windows® Professional Ultimate & Enterprise.
Eine Grafikkarte (ab OpenGL 2.0) mit dediziertem Speicher wird empfohlen.
Ergänzende Module
Erweitern Sie die Funktionalität ihres Frameworks dank des modularen Aufbaus unserer Software.