EASY-ROB™ Kernel
Software-Modul zur
Robotersimulation
Sie benötigen Robotics-Funktionalität für Ihre Software?
Dann ist der EASY-ROB™ Kernel genau die richtige Lösung.
Download Flyer
Demoversion
Der Robotics-Booster für Ihre Applikation!
Mit dem Kernel stehen Ihnen sofort mehr als 1000 Roboter für kinematische Berechnungen zur Verfügung, sowie ein Trajektorien-Planer (Bewegungsinterpolation) für PTP-, SLEW-, LIN- und CIRC-Bewegungen. Eine leistungsfähige Kollisionserkennung und zahlreiche mathematische Funktionen stehen ebenfalls zur Verfügung.
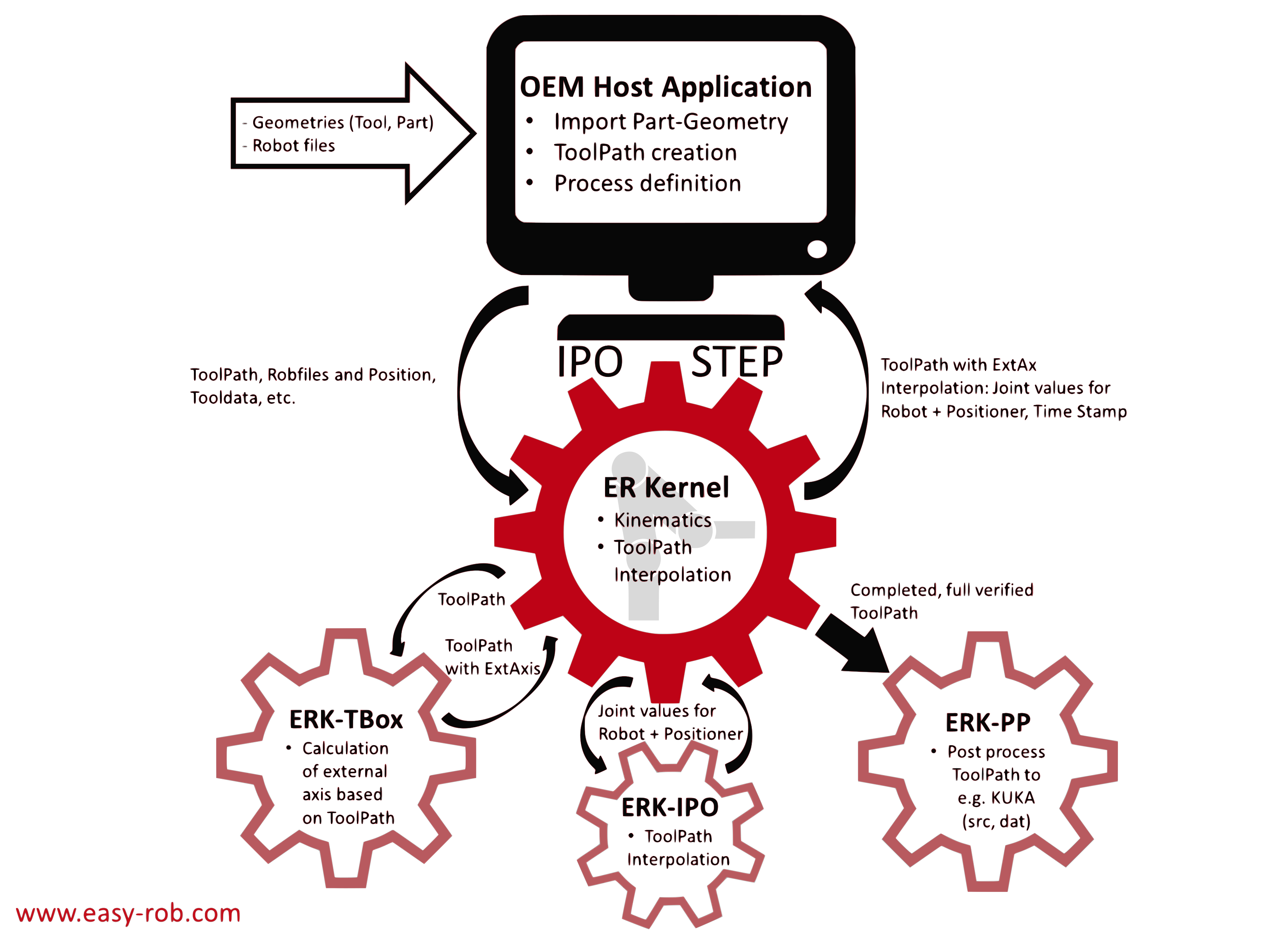
Der EASY-ROB™ Kernel dient als Plug-in zur Integration in technologiebasierte Software-Applikationen (Host-Applikation) von OEM Partnern. Es werden ausschließlich API-Funktionen und Services für die Roboter-Funktionalität zur Verfügung gestellt.
Die Host-Applikation übernimmt die 3D Visualisierung, sowie die Verwaltung sämtlicher Geometrien und Handles aller Kinematiken.
Unsere OEM Partner haben den Kernel seit Jahren erfolgreich in ihre Software integriert.
Vorteile
- Integration in technologiebasierte Softwarelösungen
- Bidirektionale Ansteuerung
- 100% Robotics Know-How
- Roboterbibliotheken
- Bewegungsplanung und -ausführung
- ToolBox für spezielle Berechnungen (option)
- Kollisionserkennung mit Toleranz (option)
- AutoPath™ kollisionsfreie Pfadplanung (option)
- 3D Visualisierung durch Ihre Host-Anwendung
- Verfügbar für Windows® (x64)
Roboterbibliotheken
Das Kernel greift auf die EASY-ROB™ Roboterbibliotheken zu. Mit aktuell mehr als 1000 Modellen sind Sie stets auf der sicheren Seite, egal welchen Roboter Sie zukünftig simulieren wollen.
Weitere Vorteile
- Mehr als 1000 Modelle
- Modellierung von eigenen Robotern, Positionierern, Greifern, Drehtischen und
- speziellen Sonder-Kinematiken
- Attribute z.B. Verfahrbereiche, max. Geschwindigkeiten und Beschleunigungen
- Formel Parser mit mathematischen Funktionen
- Numerisches Lösungsverfahren



Basisfunktionalitäten
Interpolation:
Bewegungsplanung und -ausführung
- Verfahrarten: PTP, LIN, CIRC, SLEW
- Ruckfreies und phasensynchrones Geschwindigkeitsprofil
- Werkzeug-und werkstückführende Bewegung (externer TCP)
- Track Motion (LVA)
- ConveyorTracking
- Tracking Windows(BoundaryUp& Down, Part Detect)
- Synchronisation mit externen Achsen
- Wait
- Automatische Geschwindigkeitsreduktion
- Taktzeitabschätzung
Integration
- Detaillierte Doxygen Dokumentation
- Methodenklasse ERK_CAPI
- Programmierbeispiele: Kinematik, Interpolation, ToolPath, Post-Prozessor, AutoPath™ und Kollision
- Microsoft® Visual Studio C++ Compiler Entwicklungsumgebung
ERK Interpolation/Trajectory Planner
Der ERK Trajektorien Planer erlaubt es für jede geladene Kinematik eine Zielposition (Target) mit SET_NEXT_TARGET vorzugeben, die anschließend durch zyklisches Aufrufen von GET_NEXT_STEP im Interpolationstakt angefahren wird.
Weiterhin lassen sich beliebige ToolPaths, die wiederum beliebige Targets beinhalten, welche mit Attributen wie Verfahrart, Geschwindigkeit, Beschleunigung, Tooldaten, externe Achswerte etc. versehen sind, erzeugen.
Schließlich erstellt der Postprozessor ein Roboterprogram
Ergänzende Module für den Kernel
Erweitern Sie die Funktionalität ihres Kernels dank des modularen Aufbaus unserer Software.
AutoPath™
Kollisionsfreie Bahnplanung
Collision
Kollisionserkennung von 3D Objekten
API-Post-Process
Erzeugen individueller Postprozessoren
3D-PDF Export
Die gesamte 3D-Simulation mit Animation in nur einem PDF-Dokument
ERK ToolBox
Berechnung der externen Achswerte von ToolPath-Targets für 1 oder 2 achsige Positionierer oder für Trackingachsen in Abhängigkeit von definierten Constraints, z.B. bzgl. der Werkzeugorientierung.
Individuelle Anpassungen und Erweiterungen der ToolBox Funktionalität nach Vereinbarung und Klärung der technischen Anforderungen möglich.
ERK Post-Process
Application Programming Interface (API) zum Erzeugen individueller Postprozessoren die aus dem simulierten und verifizierten ToolPath ein Programm für die Roboter/Steuerung generieren.
ERK Multi-KIN
Die Anzahl der Roboter und/oder Kinematiken ist nicht limitiert.
ERK Positionierer
Synchronisierte Bewegungen mit externem Positionierer
ERK Trackmotion
Synchronisierte Bewegungen mit externer Trackingachse
ERK Conveyor
Synchronisierte Bewegungen mit einem Conveyor
ERK External TCP
Werkstückführende Bewegungen mit einem externer TCP
ERK Tracking Window
Part-Detect, Boundary UP/Down für Lackieranwendungen