EASY-ROB™ App
Your entry into the world of robot simulation
Software for users.
Benefit from 20 years of user experience and experience
far more than 1000 robot models!


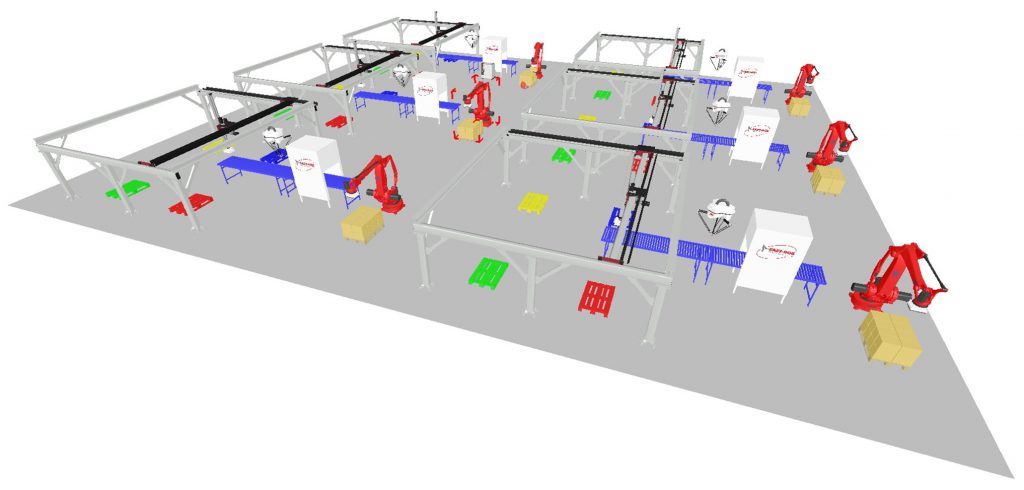


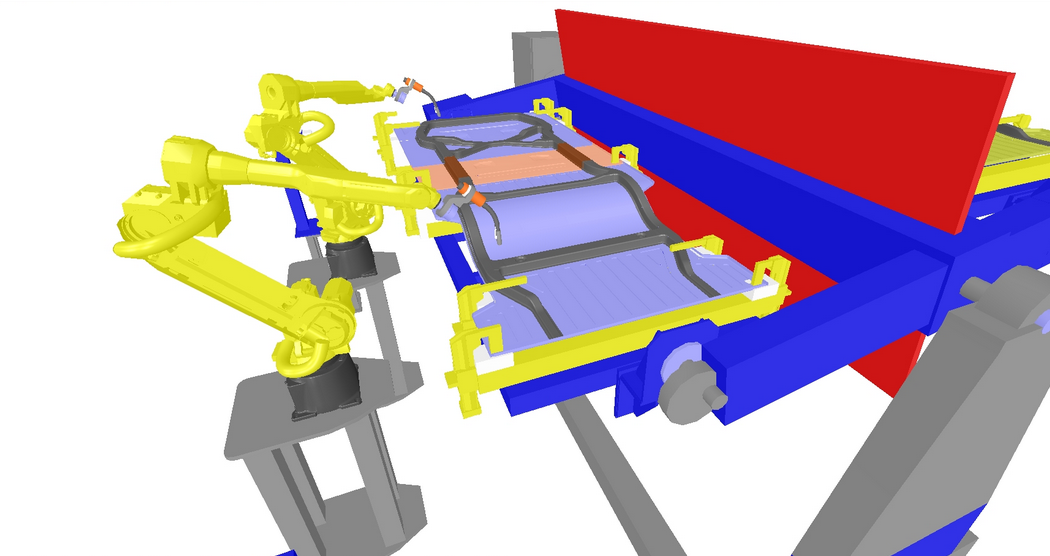
The EASY-ROB™ App handles all your virtual process steps and is intended for end users with end-to-end simulation support.
From the planning of the robot work cell to the checking of accessibility, collisions and travel ranges, to the cycle time estimation and program generation.
The EASY-ROB™ App is available in two versions: Simulate & Professional.
Download Flyer
Demoversion
Simulate
3 robots included
- Visualization
- Collision detection
- Import 3D data
- Multi-Robot version
- Free online training
- WibuKey: flexible licensing
- Presentation via 3D-PDF with animation
Professional
Access to entire Robot Libraries
- More than 1000 different models
- Individually customizable
- Scalable by a great number of options e.g. AutoPath™
- Visualization
- Collision detection
- Import 3D data
- Single or Multi-Robot
- Individual training
- Many licensing methods e.g. floating license
Features & Functions
Robot Libraries
Brands
ABB, b+m, Comau, Denso, Dürr, Eisenmann, FANUC, Guedel, igm, Kawasaki, KUKA, Mitsubishi, Mecademic, Omron/Techman, OTC-Daihen, PKM Delta, Reis, STÄUBLI, Tricept®, Unimation, Universal Robots, YASKAWA.
Additional advantages
- Modeling of own robots, positioners, grippers, turntables and special kinematics.
- Attributes e.g. travel ranges, max. speeds and accelerations.
- Formula parser with mathematical functions.
- Numerical solution method for inverse kinematics with special kinematics.



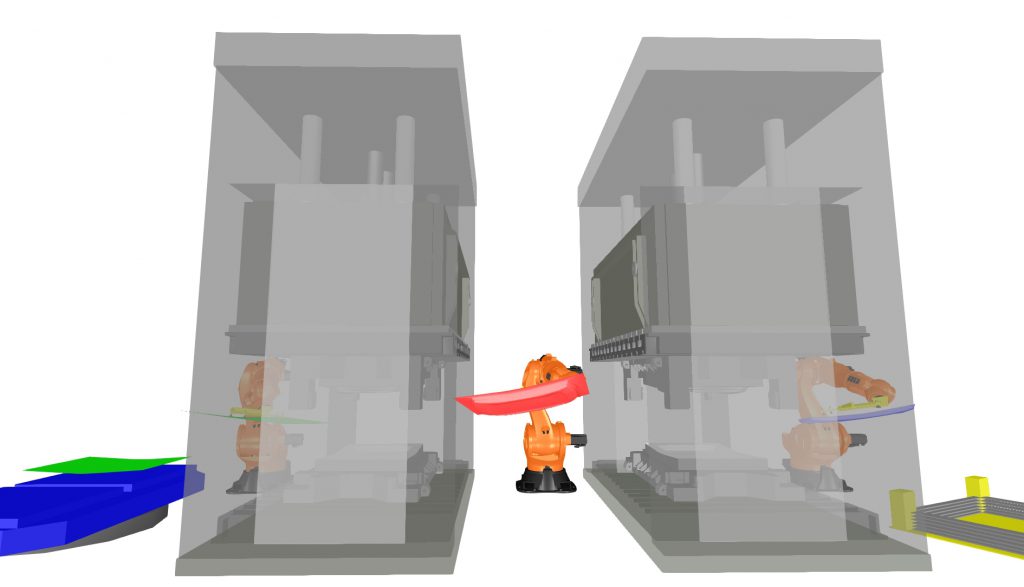
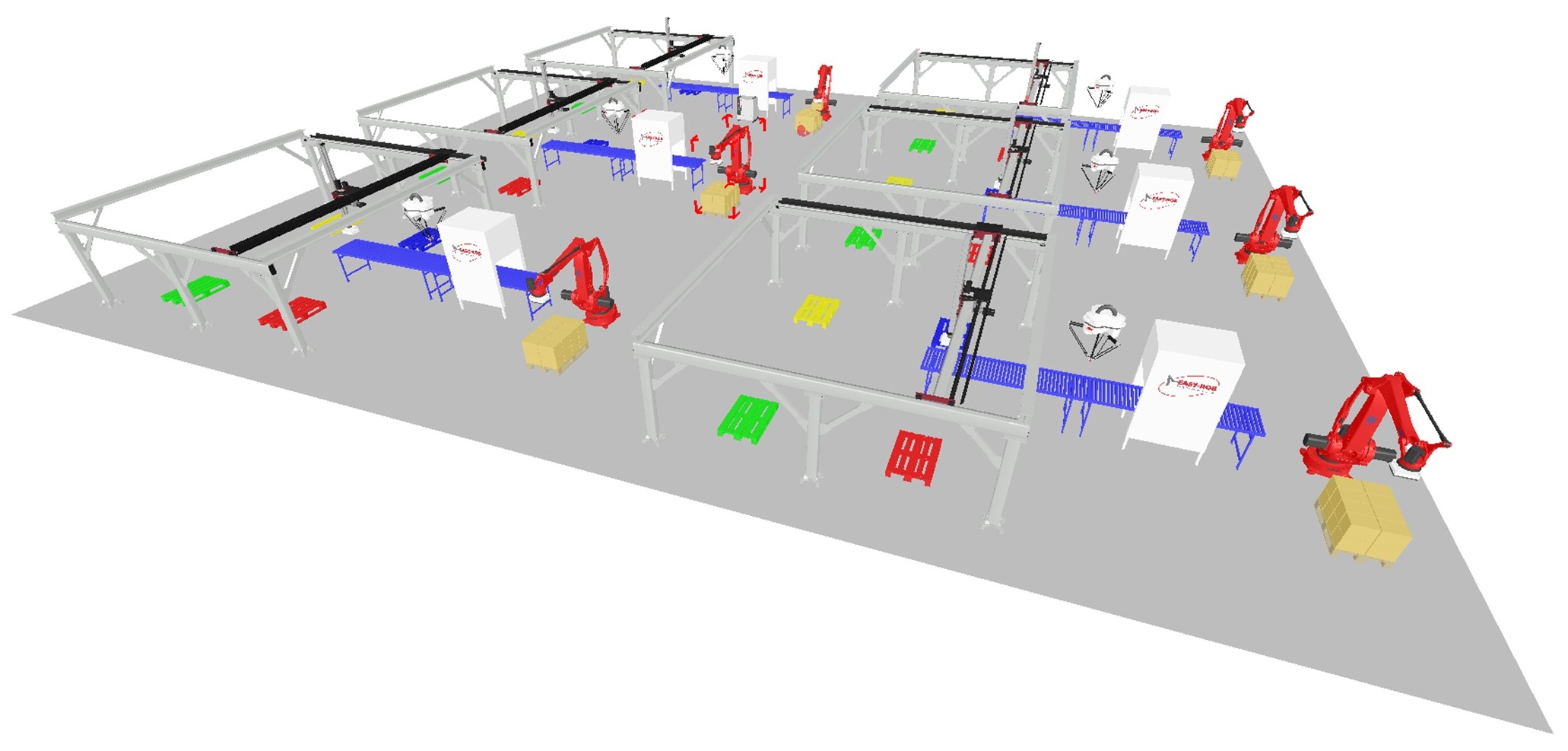
Multi-Robot
The number of robots and programs per work cell is not limited.
Robots can be synchronized and moved at the same time, whereby the programs communicate via I/O signals.
EASY-ROB™ Multi-Robot version offers the full range of functionality.
- The number of robots per work cell is not limited. Kinematics such as grippers, positioners and/or feed units can be loaded, linked and simulated as often as required.
- With Multi-Robot, multiple robots and kinematics can be synchronized and moved simultaneously, with the programs communicating via I/O signals.
Simulation – programming the work cell
- ERPL EASY-ROB™ Program Language
Language with robot commands for generating the sequence programs. Digital signals and variables for program synchronization. Formula parser with mathematical functions - ERCL EASY-ROB™ Command Language
Language with simulation commands such as switching on the collision, the Tcp track, etc. - History diagram
Detailed logging with graphical display for evaluation and documentation of the simulation results. Export as jpg or bmp file - Camera Function
Any positioning of a camera in the work cell for individual viewing from different perspectives

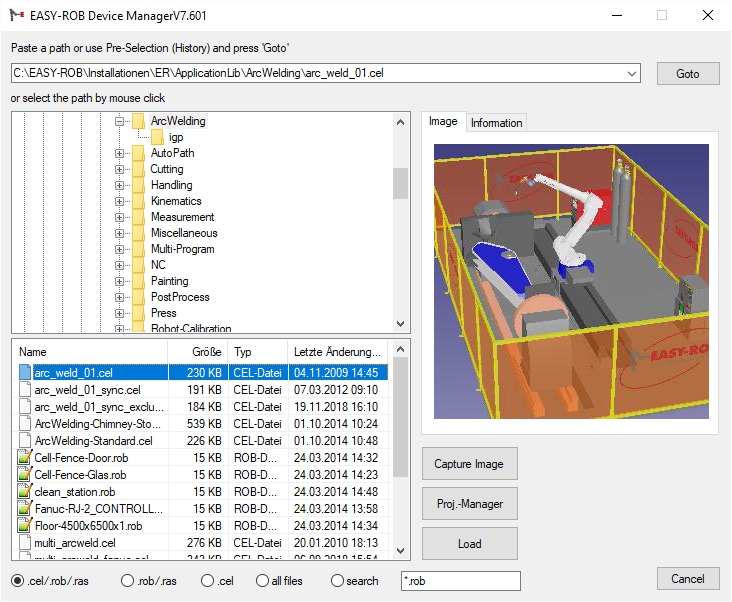
Project management
- Device Manager
Management of kinematics, components, devices and tools, which are stored as an image with textual short description.
- Project Manager
Database with visualization for customer or project-related archiving of work cells.
Layout planning
- Create paths that contain an unlimited number of target points (TAG points). Paths can be linked to geometries and / or kinematics. This defines the process. The kinematics and devices are then optimally positioned.
- Quick exchange of robots and kinematics
- Monitoring of accessibility, travel ranges, speeds and accelerations
- Hierarchical collision detection with clearance functions
- Individual measuring functions – distance and circular measurement
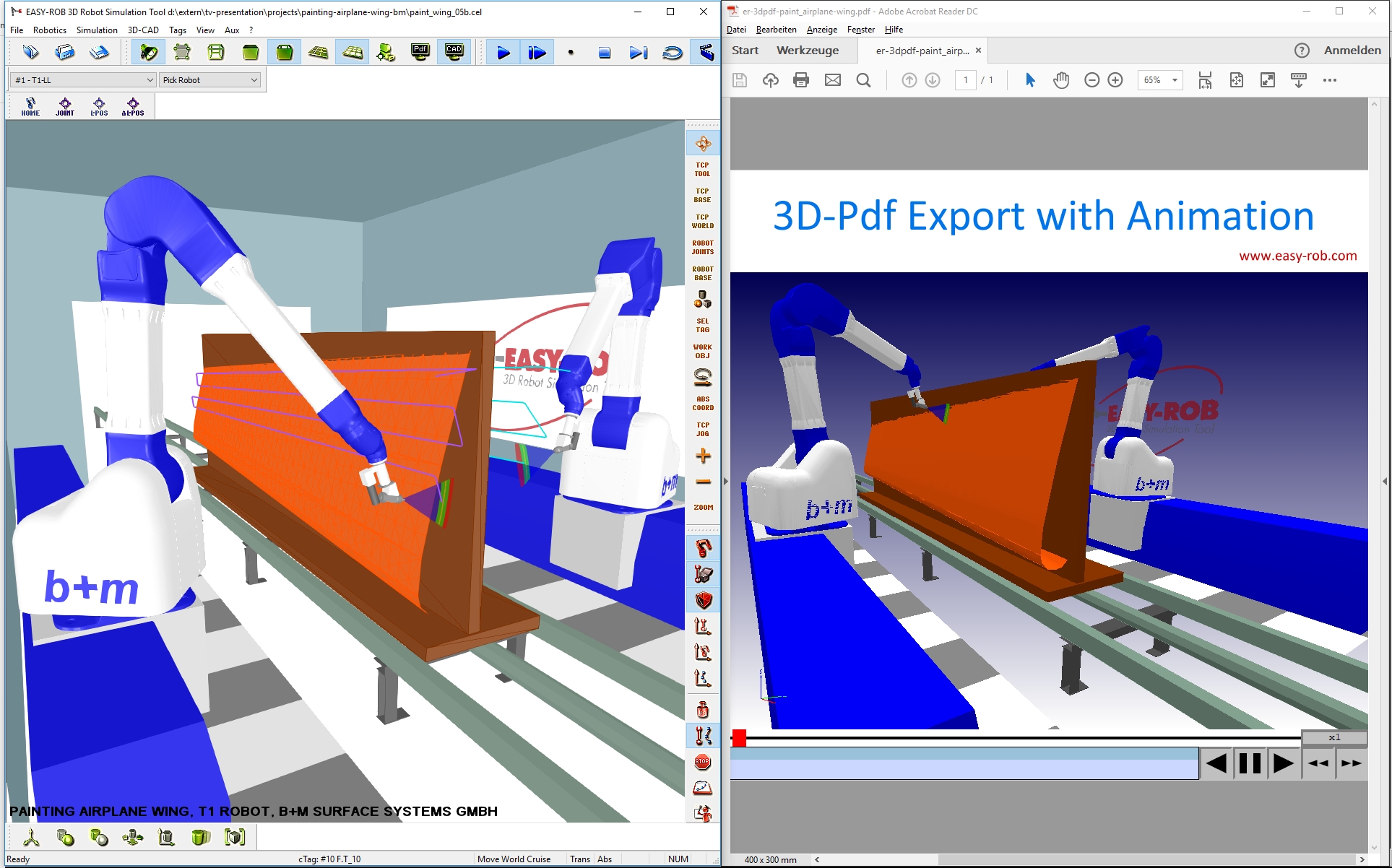
3D PDF export
The entire 3D simulation with animation in just one PDF document
Take advantage of the new EASY-ROB ™ 3D PDF export and create an animated PDF document of your simulation process in just a few steps.
Also available as SDK:
Integrate functions required in your technology-based software via C / C ++ and C # method class.
Presentation
Creation of video files (AVI) and animated VRML sequences
Optionally available: RunTime
For the production of protected working cells. Thereby you can load and simulate existing work cells with the free EASY-ROB™ Viewer for example for presentation purposes.
Operation and Licensing
- Intuitive user interface
- ERC Searcher
Simple search function of EASY-ROB ™ program commands in already created projects - EASY-ROB™ can be started any number of times on a PC
- Hardware-related licensing procedure (PC-bound)
Optional WIBU-KEY USB dongle *) - PC-independent licensing procedure
Optionally available: License Manager *)
to manage and release existing licenses
CAD data import and export
- Modeling simple parametrizable 3D geometries, e.g. cube, ball, cone, cylinder
- Standard CAD data import
IGP / STL ascii and binary / 3DS / VRML I + II, 97 - CAD data standard export
STL binary, VRML II, 97 and IGP part file - Optional CAD data import *)
Neutral interfaces: STEP
System requirements
EASY-ROB™ runs on standard laptops and PCs under Windows® 7 and 10. We recommend Windows® Professional Ultimate & Enterprise.
A graphics adapter (min. OpenGL 2.0) with dedicated memory is recommended.
Additional software modules
Extend the functionality of your App thanks to the modular design of our software.